
Ultrasound hyperthermia cancer treatments
When fusion based Model Predictive Control…
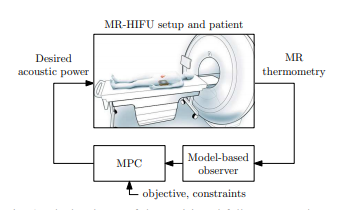
Model Predictive Control exploits a mathematical model of the system dynamics to predict its future state depending on the applied control actions. At each sampling instant, the state variables of the system, e.g., the temperatures in a set of voxels, are measured. This measurement is then used as a starting point to calculate the next control actions, e.g., a sequence of heating patterns, that minimize the objective function over a certain control horizon. The objective function’s minimum reflects the goals of the controller and depends on the predicted future state of the system. This calculation is usually done via constrained optimization, where the objective function is optimized by varying the control inputs while constraining the variables describing the system’s state (the state variables) to behave according to the model.
Tokamaks are used to confine high temperature plasmas for nuclear fusion research. A model predictive control has been applied to the transport process in a tokamak plasma that can be described by a set of nonlinear coupled partial differential equations, where the controlled quantities are the current density distribution and stored thermal energy. Applying trajectory linearizations around already commonly predefined feedforward trajectories enables to use linear MPC techniques that are computationally tractable for implementation on existing tokamaks. Special requirements for the MPC controller are that it should be able to handle real-time-varying references and constraints, whereas the system size, required prediction horizon and available computational time imposes additional challenges. An MPC controller is designed according to the requirements and its performance is analyzed in simulations that approach high performance plasma experiments in the ASDEX Upgrade tokamak. An MPC (Model Predictive Control) for combined control of the distributions of temperature and current density was developed and demonstrated at TCV tokamak within the EUROfusion programme by Felici and Maljaars.
The MPC was successfully demonstrated by Felici and Miljaars for fusion-purposes. Maljaars discovered the opportunity that this technology can be used for ultrasound hyperthermia cancer treatments. Since 2018, he is working to downstream this technology towards medical application and collaboration with ASML and Philips with the MR-HIFU system.
…can optimize ultrasound hyperthermia cancer treatments

MPC has proven to enhance the effects of chemo- and radiotherapy without inducing additional toxicity or undesirable side effects, and is therefore considered a highly valuable adjuvant therapy in cancer treatment.
Model predictive control (MPC) has been successfully used to achieve safe and optimal heating by electronic beam steering for MR-HIFU hyperthermia. The key advantage of the developed MPC algorithms compared to other existing methods (e.g., the binary controller or the hybrid proportional-integral-derivative (PID) and sliding mode controller) is their ability to explicitly take into account the tissue’s thermal dynamics and the system’s restrictive input constraints (such as the inability to actively remove heat from inside the body) when computing the desired heating input. Consequently, more homogeneous and stable target region temperatures can be achieved over a prolonged period of time.